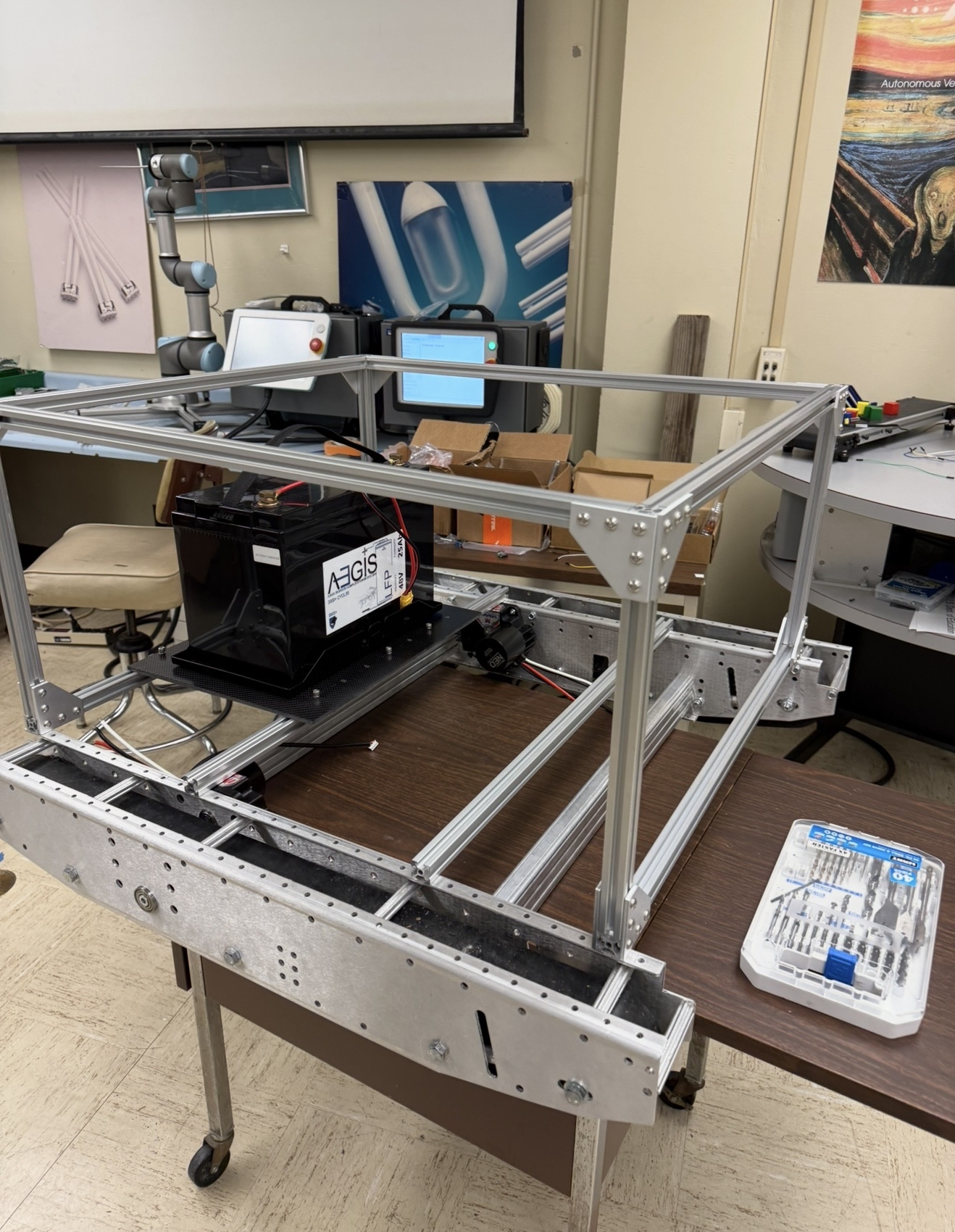
IGVC frame: building piece by piece

Motorized tank tread drive system
IGVC Project Track
This project track prepares AVL members for autonomous competition workflows, including navigation stack integration, test-course tuning, and field validation. Teams run iterative design sprints to improve reliability across hardware and software subteams.
Members contribute to documentation, simulation baselines, and physical testing checkpoints to keep the platform competition-ready throughout each cycle.
Focus Areas
- Autonomous navigation stack integration
- ROS2 deployment and diagnostics
- Sensor calibration and field validation
- Team-based engineering workflows

AVL-002 front panel: steering control electronics

AVL-002, the lab's primary research platform
AVL-002 (AV2)
AV2 is the lab's main autonomous platform for integrating and validating perception, planning, and low-level control research. The project emphasizes stable software deployment, reproducible experiments, and robust behavior in campus-like environments.
Current work includes improving sensor fusion quality, refining control smoothness, and expanding scenario coverage for day/night driving conditions.
Focus Areas
- Perception and planning pipeline hardening
- Data logging and experiment tracking
- Day/night driving scenario coverage
- Closed-loop autonomy validation

iHerb robot: disassembled to core structure

Multiple iHerb units in development
iHerb Autonomous Floor Robot
This project explores autonomous mobile robot operation for structured indoor environments. The team is prototyping navigation behaviors, obstacle handling logic, and fleet-style operation concepts to support repeatable autonomous tasks.
Development is focused on safety-first operation, maintainable software interfaces, and system reliability under day-to-day use conditions.
Focus Areas
- AMR navigation and localization
- Safety and failover behavior design
- Operational testing for repetitive tasks
- Human-robot workflow integration